私たちは、誰もがロボットを身にまとい、意のままに動き、
自分らしく生きられる世界を目指しています。
着るロボットで身体の動きを支え、導き、拡張し、「思うように動きたい」「もう一歩先へ進みたい」という思いに応え、自分に挑戦する人々の可能性をひろげていきます。
INOMERのプレスリリース・ニュースリリースをPR TIMESより発信しています。
開発中(プロトタイプ)
歩行支援 ロボティックギア

※inoGear HE-1 は現在開発中のプロトタイプです。医療機器としての承認・認証等は取得しておらず、掲載内容は研究開発・実証に関する情報提供を目的としています。

※inoGear HE-1 は現在開発中のプロトタイプです。医療機器としての承認・認証等は取得しておらず、掲載内容は研究開発・実証に関する情報提供を目的としています。
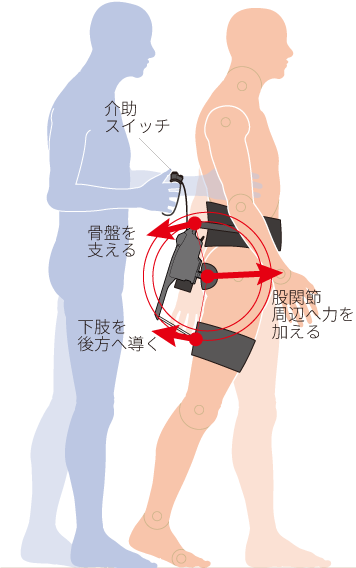
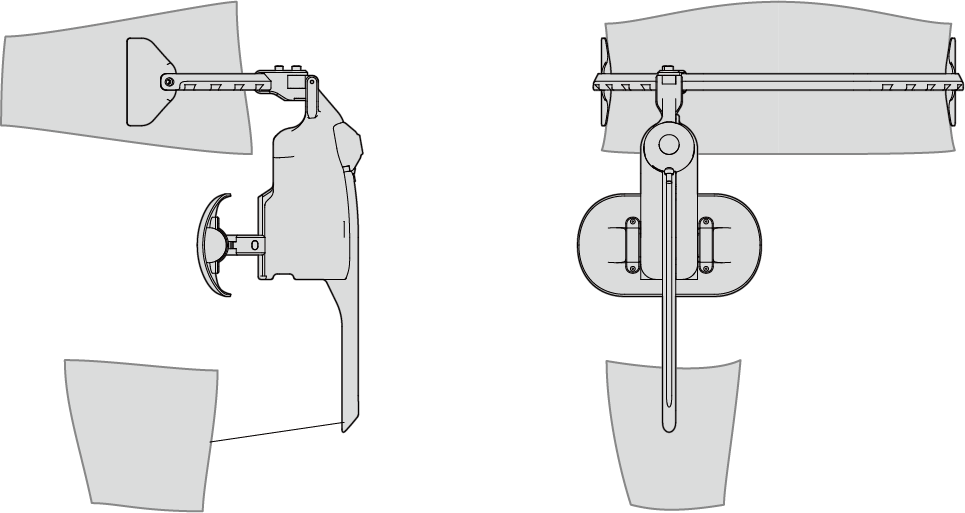
独自開発のワイヤーアクチュエーターにより、関節軸を固定しないフレキシブルな構造でありながら、骨盤・股関節周辺へ狙った方向の力を加えます。
立脚期に、骨盤を後方から支える力と、下肢を後方へ導く力を組み合わせることで、股関節伸展に関わるハンドリングを構造化。ボタン操作によって、介入タイミングを調整できるよう設計しています。
現在は、歩行時の骨盤位置や股関節伸展に関する評価を通じて、臨床現場での活用可能性を検証しています。
理学療法士が徒手で行う股関節周辺への介助(ハンドリング)に着目。
その介助意図を構造として扱うという発想から、inoGear HE-1 は生まれました。
※本動画は開発中プロトタイプの研究開発内容を紹介するものであり、治療効果・有効性・安全性を保証するものではありません
歩行リハビリにおける身体操作“ハンドリング” の属人的な要素を、設定可能な条件へ。
介助意図を構造化し、再現性のあるハンドリングを目指します。

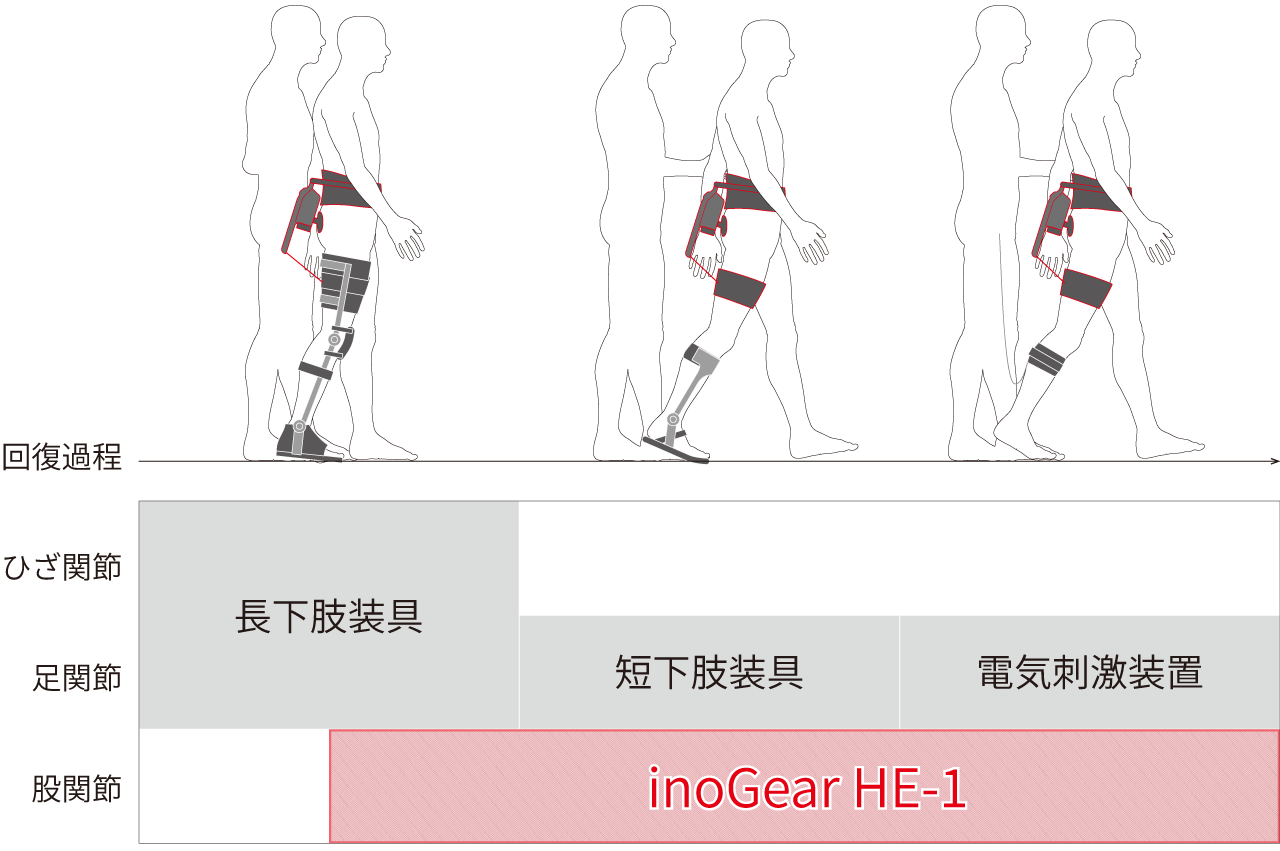
股関節周辺へのアプローチに着目しているため、長下肢装具・短下肢装具・電気刺激装置など、歩行リハビリテーションで用いられる既存機器との併用を想定しています。
| 試作機名称 | inoGear HE-1 |
|---|---|
| 本体サイズ | W 340 × H 360 × D 216mm(アパレルを含まない) |
| 本体重量 | 1.5kg(バッテリーを含む) |
| ワイヤー張力 | 最大7kgf |
| 定格電圧 | 10.8Vリチウムイオンバッテリー |
※本動画は開発中プロトタイプの装着・操作デモであり、一般販売品の取扱説明ではありません。
協力施設とともに、実証・評価を進めています。
※本動画は開発中プロトタイプの実証の様子を紹介するものであり、治療効果・有効性・安全性を保証するものではありません。
■実証・評価にご協力いただいている施設の一例です。
歩行リハビリテーションの現場における装着性、操作性、ハンドリング条件、歩行指標の変化などを確認しながら、研究開発・実証を進めています。
※以下は、開発中プロトタイプの実証・評価過程において、各施設より寄せられたコメントです。inoGear HE-1 は現時点で医療機器としての承認・認証等を取得しておらず、掲載内容は治療効果・有効性・安全性を保証するものではありません。
股関節の進展をアシストしてくれるため、歩行時に殿部が後退する患者さんに効果を発揮してくれるのではないかと期待しています。また、歩行時以外でも段差の昇降や片脚立位の訓練での活用にも効果の可能性を感じました。
こんなふうに歩行練習がしたい、という患者さんの希望にこたえることができました。ロボットを装着した状態で継続的に歩行練習を行うと、外したあとでも効果が持続し、歩容が改善されました。
ロボットのアシストが、股関節の伸展を促すため、歩幅が自然に広がり、歩行速度が向上しました。また、ロボットの形状に可変性があり、関節に変形がある患者さんでも装着が可能で、汎用性があると感じました。なによりも構造がシンプルであり、簡単にすばやく、装具のように着脱することができるので、セラピストも負担を感じることなく活用することができました。
歩行練習の際に介助をしながら歩行することが多いですが、毎回適した歩行周期に一定した介助を行うことは困難です。しかし、この機器を用いれば、一定した強度で歩行介助を行うことができ、療法士のスキルの差を埋めることができます。
生活期の患者様に対し活用させて頂きました。介助者の技量に関係なく安定した介助・誘導が可能になり、即時的に歩行速度・歩幅の指標が改善する等、歩行リハビリテーションの質や量を向上させる可能性を感じました。装着の簡便さや、特別なスペースを必要としないことから、在宅での訪問リハビリでも活用することができました。患者様からも、「麻痺側の脚が安定して歩きやすい」「脚が自然と前に出しやすくなる」などといった声が聞かれております。患者様の持つ残存機能を最大限引き出し、さらなる歩行能力向上の一助となる機器であると期待しています。
このロボットは体幹部と殿部、大腿部の3か所を固定し誘導するため、私たち理学療法士の両手を使った誘導よりも、確実かつ簡便に股関節の伸展を誘導することができる夢のようなウェアラブルロボットだと思います。装着された方も「この感覚ね!」と今まで感じることができなかった感覚を経験することで姿勢の改善や歩行速度の向上を感じられていました。
> コラム記事
※各コメントは、実証・評価過程における各施設の所感です。
| 名称 | 株式会社INOMER |
|---|---|
| 住所 | 〒631-0801 奈良県奈良市左京6丁目5-2 |
| 代表者 | 代表取締役CEO 桂 典史 |
| 設立 | 2024年4月3日 |
| 資本金 | 25百万円 |
製品・会社についてのお問い合わせ、
私たちと一緒に開発に携わりたい方はこちらのお問い合わせフォームよりご連絡ください。